Industrial automation promotes the rapid development of machine vision technology, due to the complex structure of machine vision system, most people don't know much about it, but the basic model architecture is consistent.

1. Optical imaging module
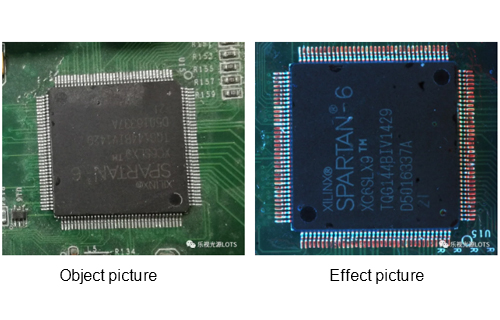
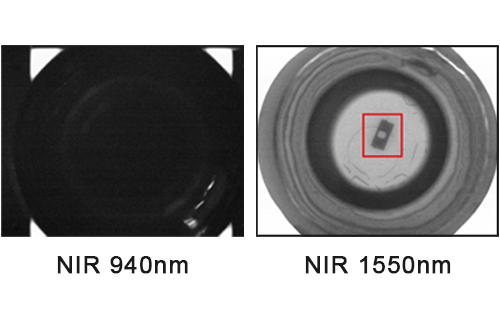
The module can be divided into two parts: lighting system design and lens optical system design.
Illumination design is to design the intensity, color, uniformity, structure and size of the light reasonably, and design the reasonable light path by studying the optical characteristics, distance, size and background characteristics of the measured object, so as to obtain the target related structural information.
Lens design is mainly based on the lighting conditions and the characteristics of the object to choose the lens focal length, aperture range. After determining the lens model, design the fixed structure of the rear end of the lens.
2. Image sensor module
The module is mainly responsible for the information photoelectric conversion and located on the image plane at the back of the lens. Mainstream image sensors can be divided into CCD(Charge-coupledDevice charge-coupled device) and CMOS image sensor. Because of the electrical signal source, a good and stable circuit drive is the key to design this module
3. Image processing module
This module is mainly responsible for image processing and information parameter proposal, which can be divided into two levels: hardware structure and software algorithm.
The hardware part is usually a CPU-Centrical circuit system. Pc-based machine vision uses a PC CPU and related peripherals. Based on embedded system, intelligent camera with independent data processing ability relies on information processing chips on board, such as DSP, ARM, FPGA, etc.
The software part includes a complete image processing scheme and decision cheme, including a series of algorithms. In the advanced image system, the database of data algorithms will be integrated to facilitate the transplantation and reuse of the system. When the algorithm library is large, the algorithm library is called through the graphical interface.
4. IO module
IO module is for output of operation results and machine vision system data. Pc-based machine vision system can be divided into internal interface and external interface. As long as the internal interface is responsible for the system to send signals to the PC high-speed communication port. External interface completes the communication and information exchange between the system and other systems or users. Smart cameras typically perform all their functions using universal IO and high-speed Ethernet.
5. Display module
The display module can be thought of as a special user IO, it gives users a more intuitive sense of how the system works. In pc-based machine vision system, data information of the system can be directly transmitted to the graphics card through PCI bus and transmitted to the computer screen through VGA interface. Smart cameras that process independently usually visualize images by extending the LCD screen and image display control chip.
The above five modules are the basic core components of machine vision system.